Kolaboratívny robot (kobot, cobot), podrobne aj v skratke :)
Autor: Eva Vaculíková, Doplnené: 27. 07. 2024
Vytvorené: 10. 10. 2021 Tlačiť
Kolaboratívne roboty rozširujú akčný rádius priemyslovej robotiky. Vstupujú na trh po dvadsaťročnom vývoji[1] a obývajú nový priestor. Popri samostatne pracujúcich konvenčných robotoch sa uplatňujú kolaboratívne roboty (koboty) stále častejšie. Môžu totiž pracovať bok po boku s pracovníkmi vo výrobe a pomáhať im s náročnými operáciami.
Ako (v čom) sa líši kobot od robota?
Rozdielny režim práce robotov jasne ukazuje, v čom sa líši konvenčný priemyslový robot od kobota, t.j.:
- v oplotení,
- v zabezpečení,
- v oblastiach použitia,
- v príprave k práci.
Oplotenie
Zatiaľ čo konvenčné priemyslové roboty sú striktne izolované od ľudskej obsluhy (či už mechanickým oplotením alebo optickými závorami, ktoré pri akomkoľvek narušení zastavia pohyb robota), koboty pracujú na výrobných linkách priamo pri človeku. Pomôžu mu s namáhavými rutinnými prácami, náročnými operáciami (skrutkovanie na neprístupných miestach) alebo s manipuláciou s ťažkými či miniatúrnymi súčiastkami.
 |
 |
Priemyslové roboty
|
Oplotenie priemyslového robota
|
Zabezpečenie
Roboty majú veľkú silu, a preto podliehajú veľmi prísnym bezpečnostným predpisom. Všetky roboty, konvenčné aj kolaboratívne, musia spĺňať bezpečnostnú normu ČSN EN ISO 10218. Podľa tejto normy musia byť bezpečnosť zaistená niektorou z uvedených funkcií:
- bezpečnostné monitorované zastavenie,
- ručné navádzanie,
- sledovanie rýchlosti a vzdialenosti,
- obmedzenie sily a výkonu.
Prvé tri funkcie sú určené pre konvenčné priemyslové roboty, zatiaľ čo štvrtá funkcia, obmedzenie sily a výkonu, je navrhnutá práve pre koboty.
Bezpečnostné monitorované zastavenie – ak vstúpi akákoľvek osoba do monitorovaného priestoru, robot sa riadeným spôsobom zastaví. Táto funkcia je typická pro roboty v oplotenom priestore resp. v klietke.
Ručné navádzanie je funkcia typická pre programovanie robotov učením. Obsluha vedie rameno robota po požadovanej dráhe a robot sa tento pohyb naučí a opakuje ho. Po vstupu obsluhy do monitorovaného priestoru sa robot riadeným spôsobom zastaví. Obsluha môže použiť povoľovacie tlačidlo a tým sa pohyb robotického ramena uvoľní pre ručné navádzanie.
Sledovanie rýchlosti a vzdialenosti – bezpečnostné snímače sledujú pohyby robota a jeho vzdialenosť od obsluhy a zaistia, aby medzi pohybujúcim sa robotom a obsluhou vždy zostala určitá minimálna vzdialenosť. Ak vstúpi osoba do monitorovaného priestoru, robot postupne spomaľuje a zastaví sa až vo chvíli, keď príde obsluha k robotu príliš blízko. Robot vybavený touto funkciou nemusí byť uzavretý v klietke, ale nie je s ním možné bezprostredne spolupracovať.
Obmedzenie sily a výkonu – funkcia pre zaistenie bezpečnosti kolaboratívnych robotov. Jej cieľom je, aby v prípade kontaktu robota s človekom nepresiahol tlak na obsluhu stanovené medze, teda nespôsobil mu neprimeranú bolesť či dokonca zranenie. Medze prijateľného tlaku stanoví špecifikácia ISO/TS 15066, ktorá dopĺňa ČSN EN ISO 10218[2].
 |
Kolaboratívny robot spoločnosti Universal Robots |
Ako je technicky vyriešené, aby kobot nezranil obsluhu?
Keďže môžu koboty do ľudského operátora naraziť, existujú nasledujúce konštrukčné prvky, ktoré zabránia neprimeranému tlaku:
- rýchlostné a momentové senzory v kĺboch robota signalizujú, akou silou pôsobí rameno robota pri kontakte s obsluhou a v prípade prekročenia nastavených medzí sa robot okamžite zastaví,
- čo najľahšie ramená kobotov – čím je rameno ľahšie, tým menší je náraz do obsluhujúceho pracovníka,
- pomalší pohyb ramien robotov – kobot sa nikdy nepohybuje tak rýchlo, aby sa nemohol okamžite zastaviť,
- zaoblené tvary robotov – sila ramena sa rozloží na väčšiu plochu a tak sa tým zníži náraz,
- mäkká vrstva na povrchu ramena robota zmierni náraz,
- citlivá vrstva (sensitive skin) na povrchu ramena kobotov je tvorená veľkoplošným kapacitným senzorom, ktorý detekuje približovanie objektu k ramenu robota a vydá pokyn k zabrzdeniu, aby v okamihu dotyku rýchlosť vyhovovala požiadavkám ISO/TS 15066,
- elastické členy v kĺboch ramien,
- kamery sledujúce okolie kobotov upozornia na blížiacu sa obsluhu[3].
Oblasti použitia
Konvenčné roboty a koboty si rozhodne nekonkurujú. Každý typ má na trhu svoj vlastný priestor.
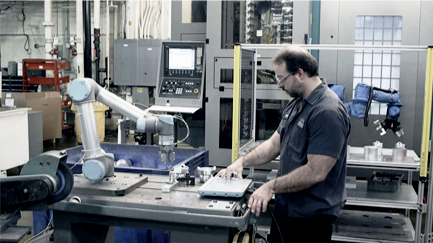 |
Kolaboratívny robot ako spolupracovník v dielni |
Koboty sa uplatnia hlavne pri týchto úlohách:
- malé série produktov, každý z nich môže byť v inom prevedení,
- robotické operácie prevádzané súbežne s manuálnymi prácami,
- prevádzky, ktoré nie je možné kompletne automatizovať,
- manipulácia s ľahšími súčiastkami.
 |
 |
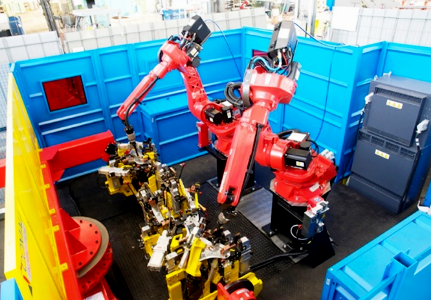
Konvenčné zváracie roboty
|
Kolaboratívny robot KUKA
|
Konvenčné priemyslové roboty sa využívajú v týchto podmienkach:
- v plne automatizovaných linkách vyrábajúcich veľké série výrobkov,
- pre operácie vyžadujúce vysokú rýchlosť a maximálnu presnosť,
- pre človeka nebezpečné procesy (lakovne...),
- pri manipulácii s ťažkými bremenami.
Príprava na prácu
Konvenčné priemyslové roboty pracujú väčšinou v automatizovanej výrobe. O inštaláciu a programovanie sa starajú špecialisti v odbore a spustiť robotizovanú linku môže trvať týždne.
Kolaboratívne roboty sa ľahko inštalujú a nastavia na požadovanú operáciu. Pomocou intuitívneho rozhrania ich dokážu pripraviť na prácu pracovníci prevádzky v priebehu jedného dňa. Koboty sa preto ľahko inštalujú na iné miesto a naprogramujú na novú prácu.
[1] Myšlienka skonštruovať robot priamo spolupracujúci s človekom vznikla už v roku 1995 v rámci výskumného projektu nadácie General Motors Foundation.
[2] Autorom špecifikácie je technická komisia ISO/TC 299, v ktorej sú zastúpení všetci významní výrobcovia priemyslových kolaboratívnych robotov: Universal Robots, ABB, Rethink Robotics, Kuka, Fanuc, Denso Wave a Yaskawa.
[3] Umožnia tiež zbierať rôzne typy výrobných súčiastok a vkladať ich do rúk ľudského pracovníka.
Cobot v skratke:
Kolaboratívne roboty posúvajú priemyselnú výrobu na vyššiu úroveň - sú schopné nielen pracovať vedľa ľudí, ale dokonca aj priamo spolupracovať s ľuďmi na spoločnom zadaní a zabezpečiť absolútnu bezpečnosť, potrebnú flexibilitu a produktivitu. Vedia pracovať na rôznych úlohách. Vedia na svoje plecia prevziať činnosti, ktoré môžu byť pre zamestnancov nudné a monotónne. Napríklad, také uťahovanie skrutiek. Zamestnanec sa môže venovať iným, oveľa komplexnejším úlohám. Dnešné kolaboratívne roboty sa navyše už ľahko programujú a dajú sa využiť flexibilnejšie. Medze sa im naozaj nekladú.
Dnes pracuje spoločne s ľuďmi po celom svete vo fabrikách aj laboratóriách a vykonáva rozličné úlohy od montáže elektronických súčiastok až po testovanie bankomatov. Ľahké programovanie kolaboratívnych robotov je presne to, po čom dnes túžia aj menšie podniky, ktoré môžu vyrábať širšiu škálu produktov. To je typ spoločností, ktoré sa čoraz viac rozhodujú pre koboty/coboty: menšie podniky so stále sa meniacimi výrobnými linkami môžu profitovať najmä z jednoduchosti preprogramovania týchto robotov.
Myšlienka kolaboratívneho robota vznikla v roku 1995 v rámci výskumného projektu General Motors Foundation. Spoločnosť ABB uviedla na trh svoj prvý kolaboratívny robot YuMi v roku 2015.
Kolaboratívne roboty (koboty) predstavujú rozšírenie akčného rádiusu priemyselných robotov. To znamená, že v porovnaní s priemyselným robotom nie je potrebné ochranné oplotenie. Práca bez oplotenia umožňuje spoluprácu medzi človekom a kobotom, a to bez rizika úrazu. Takáto spolupráca prináša vyššiu flexibilitu práce ako u priemyselného robota.
Kolaboratívny robot zaberá v priestore omnoho menší priestor ako priemyselný robot, ale naproti tomu kolaboratívny robot nedosahuje takú záťažovú nosnosť ako priemyselný. Všetky robotizované bunky kolaboratívnych robotov musia spĺňať bezpečnostnú normu ČSN EN ISO 10218-1 a ISO 10218-2. V tejto norme je ustanovené, ktoré bezpečnostné zaistenia musia roboty obsahovať. Prvé tri zaistenia sú pre priemyselné roboty a štvrté zaistenie prináleží kobotom. Aktuálna ponuka na trhu kobotov je bohatá. Vo svojom portfóliu ich majú všetci hlavní výrobcovia priemyselných robotov a okrem nich aj niekoľko malých firiem, ktoré sa na koboty priamo špecializujú. K najvýznamnejším patria Fanuc, ABB, Kuka, Nachi, Denso, Yaskawa, Universal Robots, Rethink Robotics, Aubo, Techman, Hanwha...
Porovnanie priemyselných a kolaboratívnych robotov
Zdroje
Prevzaté a upravené z:
• https://www.talentica.sk/robot-alebo-kobot/,
• https://www.pracovnepravo.sk/sk/casopis/bezpecnost-prace-v-praxi/priemysel-4-0-digitalizacia-robotika-a-ich-posobenie-v-oblasti-bozp-4-koboty-coboty.m-1142.html.





![]()
· Simulácie z fyziky· O Slovensku po slovensky· Slovenské kroje· Kurz národopisu· Diela maliarov· Kontrolné otázky, Domáce úlohy, E-testy - Priemysel· Odborné obrázkové slovníky· Poradňa žiadaného učiteľa· Rýchlokurz Angličtiny. Rozprávky (v mp3)· PREHĽADY (PRIBUDLO, ČO JE NOVÉ?)Seriály:· História sveta (1÷6)· História Slovenska (1÷5)· História módy (1÷5).
Členstvo na portáli
Poznámka pre autora
Copyright © 2013-2026 Wesline, s.r.o. Všetky práva vyhradené. Mapa stránky ako tabuľka | Kurzy | Prehľady |

