História vzniku, rozvoja a útlmu priemyselnej robotiky v Československu - 06. časť – A je tu robotizácia :)
Autor: Milan Plášek
Vytvorené: 22. 10. 2017 Tlačiť
Od roku 1974 vznikla rozhodnutím Ministerstva pre technický a investičný rozvoj štátna úloha vedecko-technického vývoja Rad stavebnicových priemyselných robotov a manipulátorov pre automatizáciu výrobných procesov (P-15-124-062). Vedúcim úlohy bol, dnes už nežijúci, Ing. Štefan Pollák, CSc.
Vedúcim prvej čiastkovej úlohy P-15-124-062-01 Typový rad priemyselných robotov bol Ing. Milan Plášek - druhej úlohy P-15-124-062-02 Typový rad manipulátorov bol Ing. Ladislav Stassel.
 |
Štúdia pre stanovenie a rozbor technických parametrov vyrábaných
|
V tých dobách sa robotizácia sa chápala ako zavádzanie, nasadzovanie priemyselných robotov do konkrétnych výrobných procesov, hlavne v strojárenskom priemysle, v technológiách:
- trieskové obrábanie,
- brúsenie,
- plošné tvárnenie,
- objemové tvárnenie,
- oblúkové zváranie MIG a MAG (prípadne bodové),
- tlakové liatie kovov,
- montáž.
Niektoré roboty mali už vlastnosti zodpovedajúce daným technológiám. Tak napríklad, u robotov PR-32E a APR-20 sa uvažovalo, okrem ich univerzálnosti, ich prednostné nasadzovanie v oblúkovom a bodovom zváraní. AM-1, AM-05, M-40 mali byť určené pre plošné, prípadne objemové tvárnenie výkovkov do malých hmotností. Systém M63 s hydraulickými pohonmi bol univerzálny stavebnicový, pozostávajúci z jednotlivých modulov, portálových, stĺpových otočných, vertikálnych a podobne, zostavovaných pre konkrétnu aplikáciu[1]. Robot PR16, s pneumatickými pohonmi, bol považovaný za univerzálny. Číslo za typom znamenalo ich nosnosť v kg, pri optimálnych rýchlostiach manipulácie, maximálnej, nie priemernej rýchlosti koncového člena, receprora, chápadla alebo technologickej hlavice do 1 m za sekundu.
 |
PR-16P – prvý sériovo vyrábaný priemyselný robot v Československu |
Ako prvý bol ukončený vývoj priemyselného robota prvej generácie PR-16P. Išlo o prvý priemyselný robot v Československu. Vedúcim jeho konštrukcie bol Ing. Milan Plášek. Sériová výroba PR-16P[2] sa začala v rokoch 1975-1976. Išlo o robotický systém s pneumatickými pohonmi s maximálnou hmotnosťou manipulovaných predmetov do 16 kg. Robot pracoval v cylindrických súradniciach s troma stupňami voľnosti ramena a dvoma stupňami zápästia. Bol určený na automatickú obsluhu výrobných strojov a zariadení s možnosťou upevnenia na viacpolohový pojazd. Robot pôvodne disponoval riadiacim systémom NS 910, pričom používal feritovú pamäť. Počet krokov v pracovnom cykle bol do 100. Pracoval s riadením bod do bodu (PTP - point to point). V pôvodnej modifikácií bolo možné tento robot riadiť aj diernou páskou a mal možnosť ovládania cez nadriadený počítač a vysielať povely k technologickým zariadeniam a príslušného periférneho okolia. Celková hmotnosť bola pomerne vysoká, 813 kg, a to z dôvodu vysokej hmotnosti podstavy, amortizujúcej dynamické sily pohybujúcich sa hmôt, hlavne pri združených pohyboch (Coriolisove a Ressalove zrýchlenia). Ako prvý, sériovo vyrábaný priemyselný robot v Československu, bol verejnosti predstavený na medzinárodnej výstave ROBOT v Brne v roku 1978. Robot PR-16P je patentové chránený siedmimi autorskými osvedčeniami a dvoma priemyselnými vzormi. Designové[3], tvarové riešenie realizoval akademický sochár Mikuláš Sladkovský. Do roku 1992 sa vyrobilo viac ako 90 kusov PR-16P.
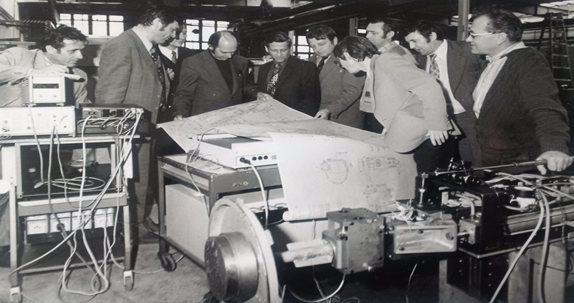 |
Meranie základných funkčných charakteristík prototypu robota PR-16P v roku 1976.
|
Druhým priemyselným robotom, vyvinutým vo VUKOVe v rokoch 1977-1978, ako realizačný výstup už uvedenej štátnej úlohy, ale už druhej technickej generácie, pracujúci vo sférických súradniciach, je PR 32E[4] s riadiacim systémom RS-2 (vedúci konštruktér Ing. Igor Marcin). Ide o prvý Československý robot s elektrickými pohonmi typu DC MEZOMATIC z MEZ Brno pre všetkých päť stupňov voľnosti. Pracoval v režime PTP a CP (continucus poth). Celá prvková základňa bola z domácej produkcie. Guľôčkové skrutky z TOS Kuřim, globoidné prevody s deliteľnými pastorkami zo ŠKODY Plzeň, telesá ramien a prevodoviek z hliníkových zliatin z KOVOHUTY Dečín a riadiaci systém z TESLY Kolín. Bol najčastejšie používaný pre oblúkové zváranie a manipuláciu do mozaikových zostáv.
 |
PR-32E nasadená pri oblúkovom zváraní MiG a MAG |
Do roku 1992 sa ich vyrobilo viac ako 120 kusov, hlavne v ZŤS, kde bola z VUKOV odovzdaná výrobná dokumentácia a ZEZ Hořice. Vukov vyrábal roboty len pre projekty ktoré realizoval.
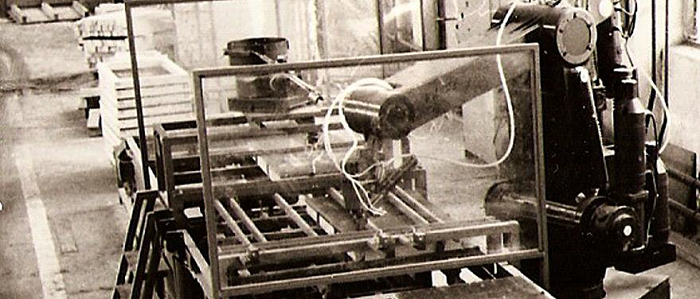 |
Robotizované pracovisko s PR 32E v Drevone Podolinec. Robot nesie technologickú
|
Tretím priemyselným robotom vyvinutom vo VUKOVe je APR-20. Zaraďuje sa do skupiny adaptívnych robotov, robotov tretej generácie. Ako pohony boli použité elektrické motory BROMBOWERY s lisovanými rotormi a permanentnými magnetmi a harmonické prevodovky. Okrem dráhového riadenia vo svojich šiestich osiach riadil spojito ďalšie štyri osi. To sa využívalo hlavne na riadenie polohovadiel pre oblúkové zváranie zložitých zvarencov. Riadiacim systémom bol RS4-A umiestnený v samostatnej skrini a s ovládacím a programovacím pultom. Jeho súčasťou bola ďalšia skriňa pre napájanie a reguláciu pohonov. Vedúcim konštruktérom bol Ing. Anton Palko, CSc. Počet vyrobených a nasadených kusov mi nie je známy. Nasadzované boli len tie, ktoré vyrobil VUKOV.
Okrem týchto troch robotov, avšak v menšom počte boli vo VUKOV-e vyvinuté manipulátory AM-1T, M-40 a MPH-1.
AM-1T[5] bol jednoruký manipulátor s dvoma stupňami voľnosti . Išlo o účelový manipulátor pre prepojenie lisov plošného tvárnenia pre výlisky do hmotnosti 1 kg. Jeho horizontálny pohyb v dĺžke 0,5 metra premiestňoval výlisky, vertikálny pohyb nastaviteľný od 0 do 0,1 m, slúžil ma vyberanie a ukladanie výliskov do zápustiek. Na oboch koncoch ramena boli elektromagnetické alebo prísavkové podlakové hlavice. Konštruktérom bol Karol Antony. Fotografie, ako aj výrobná dokumentácia sa dodnes nenašla a nie sú známe ani počty vyrobených kusov. Manipulátory okrem iných prevádzok, bezporuchovo pracovali v ESKA Cheb, pri obsluhe lisov na výrobu reťazových kolies bicyklov.
M-40 bol manipulátor s pneumatickými pohonmi, jedným stupňom voľnosti horizontálneho ramena s výsuvom 1,2 m a nosnosťou 40 kg a jedným stupňom voľnosti zápästia zdvihu 0 až 0,1 m, pracujúcich do dvoch polôh podľa mechanického nastavenia.
MPH-1 bol o účelový manipulátor pre obsluhu vstrekovacích lisov plastických hmôt s nosnosťou do 1-ho kg. Využíval elektrické pohony. Vedúcim konštruktérom bol Ing. Štefan Krč. Údaje o počte vyrobených a nasadených kusov sa už nedajú spresniť. Jeho vývoj prebiehal od roku 1980.
Univerzálny stavebnicový systém M-63 bol najrozšírenejší a najuniverzálnejší manipulačný systém, ktorý bol vo VUKOVe vyvinutý. Vedúcim konštruktérom bol Ing. Ladislav Stassel a designovo ho upravoval akademický sochár Mikuláš Sladkovský. Skladá sa z 90 % zo stavebnicových translačných hydraulických jednotiek, dvojpolohovo, bodovo, alebo číslicovo riadených s využitím domácej prvkovej základne. Základná nosnosť bola 63 kg na jednu vertikálnu jednotku, alebo chápadlo. Systém sa dodával v účelových zostavách stanovaných projektantom výrobného systému, alebo investorom. Používal riadiaci systém NS-910 a mohol byť riadený nadradeným systémom. Najčastejšie sa dodával v portálových zostavách prekrývajúcich výrobné systémy, dopravné systémy a periférie pracujúce v automatickom režime. Celkove bolo vyrobených a dodaných viac ako 240 zostáv. Vývoj základných jednotiek M-63 bol ukončený do roku 1980.
Pre zabezpečenie plného automatického režimu robotického systému nepostačuje samotný robot a príslušné technologické zariadenie. Ide v prvom rade o koncové členy ramien robota, chápadiel, technologických hlavíc, a tiež systémové okolie čo sú: polohovadlá, dopravníky, systémové palety, obracače a podobne. Jedná sa vo väčšine o jednoúčelové zariadenia vlastné len konkrétnemu robotickému systému. Preto vo VUKOVe bol vytvorený konštrukčný útvar s názvom Konštrukcia periférnych zariadení. Jeho vedúcim konštruktérom bol Ing. Karol Kravec. Prakticky pre všetky robotické systémy ktorých subdodávateľom bol VUKOV, sa tu konštruovali, vyrábali a dodávali tieto jednoúčelové zariadenia.
Samostatnou a vážnou podmienkou bolo prispôsobiť stávajúce technologické zariadenia pre interakciu a robotom. Teda ich konštrukčná úprava a hlavne signálno-energetické prepojenie s nadradeným riadiacim systémom, ktorý bol v prevažnej väčšine riadiaci systém robota. Preto bol vytvorený odbor elektrokonštrukcie a programovania. Vedúcim bol Ing. Marian Bujňáček.
[1] M63 bol vyrábaný v kooperácii s Vihorlat Snina až do začiatku privatizácie VUKOVu.
[2] P znamená pneumatický pohon.
[3] V tých časoch sa design chápal nielen ako tvarové riešenie, ale aj ako riešenie zohľadňujúce ergonómiu a bezpečnosť.
[4] E znamená elektrický pohon.
[5] T znamená translančný (priamočiary) pohyb.





![]()
· Simulácie z fyziky· O Slovensku po slovensky· Slovenské kroje· Kurz národopisu· Diela maliarov· Kontrolné otázky, Domáce úlohy, E-testy - Priemysel· Odborné obrázkové slovníky· Poradňa žiadaného učiteľa· Rýchlokurz Angličtiny. Rozprávky (v mp3)· PREHĽADY (PRIBUDLO, ČO JE NOVÉ?)Seriály:· História sveta (1÷6)· História Slovenska (1÷5)· História módy (1÷5).
Členstvo na portáli
Poznámka pre autora
Copyright © 2013-2026 Wesline, s.r.o. Všetky práva vyhradené. Mapa stránky ako tabuľka | Kurzy | Prehľady |

