Funkcie, charakteristiky a kinematické systémy priemyselného robota: kartézsky systém (TTT), cylindrický (RTT), sférický (RRT), angulárny (RRR), robot s kinematikou RRT-SCARA, stupne voľnosti :)
Vytvorené: 12. 07. 2021 Tlačiť
Hlavné funkcie priemyselného robota:
- manipulačná schopnosť - t.j. schopnosť uchopovať objekty, prenášať, orientovať a polohovať ich vrátane technologických nástrojov,
- univerzálnosť - to znamená, že robot neslúži iba k jednému účelu, ale po zmene programu, koncového efektora alebo nástroja, je ho možné použiť i pre iné účely pri iných podmienkach a iteračných vzťahoch aplikovaného prostredia,
- vnímanie - schopnosť vnímať pracovné a operačné prostredie z vnútorných a vonkajších snímačov pre riadenie funkcií cieľového programu,
- autonómnosť - schopnosť samostatne vykonávať požadovanú postupnosť úloh, podľa zadaného programu, resp. v kombinácii s určitým stupňom samo rozhodovania o výbere postupu pre realizáciu úlohy,
- integrovanosť - schopnosť softvérovo a hardvérovo sústrediť funkčné skupiny a hlavné subsystémy (aj riadiaceho subsystému) podľa možnosti do jedného kompaktného celku robotizovaného pracoviska.
Základné charakteristiky priemyselného robota:
- typ kinematického systému,
- počet stupňov voľnosti, manipulatívnosť – obratnosť,
- rýchlosť robota,
- veľkosť pracovného priestoru,
- nosnosť konštrukcie,
- presnosť a opakovateľnosť polohovania,
- úchop robota – koncová časť ramena robota, ktorá slúži k vykonávaniu konkrétnej činnosti, najčastejšie k uchopeniu predmetu[1].
Kinematické systémy robota:
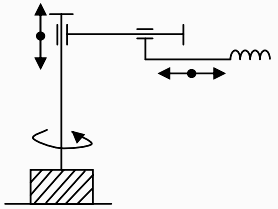
- kartézsky systém (TTT) – spočíva v tom, že sa posúva v smere dopredu – dozadu, vľavo – vpravo, hore - dole. Ako príkladom môže byť portálový žeriav alebo fréza,
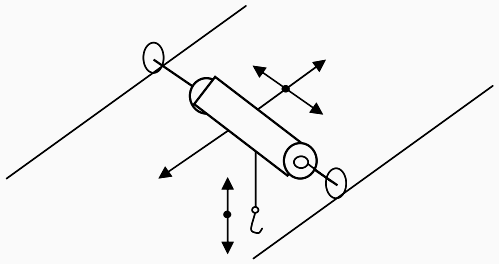
- cylindrický systém (RTT) – rameno vykonáva otáčavý pohyb, pohyb hore – dole a dopredu - dozadu. Príkladom môže byť vrtací alebo doťahovací mechanizmus,
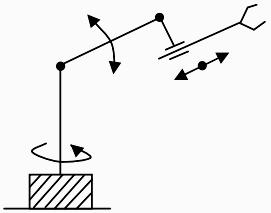
- sférický systém (RRT) – robot vykonáva sa pohyb otočný, kyvný a dopredný. Príkladom sú bežné priemyselné roboty na zváranie, doťahovanie...,
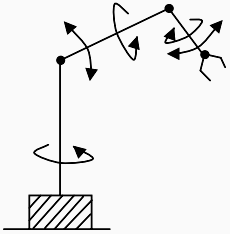
- angulárny systém (RRR) – robot vykonáva rotačný alebo kyvný pohyb vo všetkých troch osiach,
a tiež
- robot s kinematikou RRT-SCARA.
 |
 |
 |
 |
|||
TTT |
x |
RTT |
x |
RRT |
x |
RRR |
Pohybové vlastnosti robotov sú dané počtom rotačných osí (R) a počtom priamych (T). K dosiahnutiu akéhokoľvek bodu v priestore sú potrebné aspoň 3 osi, ktoré sa nazývajú hlavné a sú súčasťou ramena robota. K nastaveniu uchopenia alebo nastavenia ľubovoľnej polohy v rámci pracovného priestoru je už potrebných minimálne 6 osí, ktorým hovoríme stupne voľnosti[2].
[1] Spôsob úchopu môže byť kliešťový, prísavkový, magnetický alebo skrutkový.
[2] Ďalšie stupne voľnosti sa dajú dosiahnuť použitím podvozku a samostatnej manipulačnej hlavice.
Priemyselný robot, štruktúra, funkcie, klasifikácia, manipulátor, servisný robot, humanoidný robot
Zdroje
Prevzaté a upravené z:
• https://ssjh.sk/dokuwiki/doku.php/mnk/definicia_struktura_a_funkcie_priemyselneho_robota.
Hodnotenie užitočnosti článku:





![]()
· Simulácie z fyziky· O Slovensku po slovensky· Slovenské kroje· Kurz národopisu· Diela maliarov· Kontrolné otázky, Domáce úlohy, E-testy - Priemysel· Odborné obrázkové slovníky· Poradňa žiadaného učiteľa· Rýchlokurz Angličtiny. Rozprávky (v mp3)· PREHĽADY (PRIBUDLO, ČO JE NOVÉ?)Seriály:· História sveta (1÷6)· História Slovenska (1÷5)· História módy (1÷5).
Členstvo na portáli
Poznámka pre autora
Copyright © 2013-2026 Wesline, s.r.o. Všetky práva vyhradené. Mapa stránky ako tabuľka | Kurzy | Prehľady |

