Programovanie robotov, play-back, teach-in, off-line, pohony robotov, pohonové systémy robotov :)
Vytvorené: 12. 07. 2021 Tlačiť
Programovanie robotov
Programovanie činnosti robota môžeme realizovať 3 základnými metódami:
- play-back – celý pracovný postup robota sa najprv urobí manuálnym vedením ramena a riadiaca jednotka si tento pohyb zaznamená. Naučené pohyby robot donekonečna opakuje,
- teach-in – ide o metódu postupného učenia, kedy predvádzame akú činnosť má robot predvádzať a on si túto činnosť prispôsobuje,
- off-line – spočíva v tom, že celú činnosť do detailov, dopredu naprogramujeme a potom vložíme do robota.
Pohony robotov
Pohon robota môže byť realizovaný hydraulickými, pneumatickými alebo elektrickými pohonmi. Používajú sa aj roboty s kombinovaným rozmiestnením pohonov. Tieto pohony môžu vykonávať rotačný alebo translačný pohyb.
 |
Štruktúra pohonu priemyselného robota |
Pohony robotov sú prevažne tvorené elektrickými servomotormi. Pre extrémne veľké záťaže a nasadenie v prostredí s nebezpečím výbuchu sa používajú hydraulické motory (hydromotory). Pneumatické pohony sa väčšinou používajú len pre manipulátory vykonávajúce jednoduché opakujúce sa pohyby.
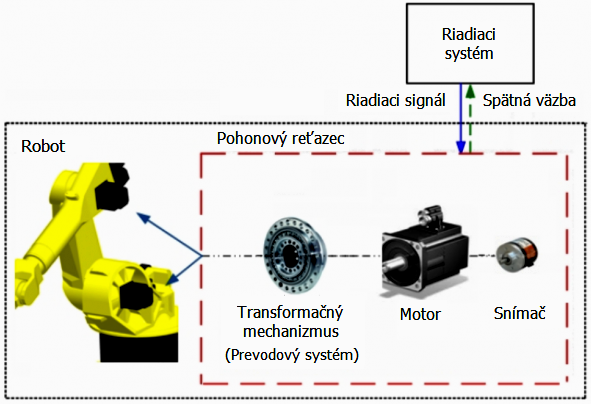
Pohonové systémy robotov
Úlohou pohonu robota je uviesť jeho rameno predpísaným spôsobom do určeného pohybového stavu tak, aby pracovný mechanizmus (efektor) realizoval požadovanú manipulačnú alebo technologickú operáciu s predpísanou presnosťou.
Inak:
Pohony robotov majú za úlohu presne polohovať koncový efektor po zvolenej dráhe a to aj s presne požadovanými parametrami (miesto, čas, tvar dráhy, rýchlosť, zrýchlenie). Aby tieto požiadavky mohol efektor splniť musí mať schopnosť operatívne vykonávať nariadenia od riadiaceho systému a zároveň mu poskytovať spätnú väzbu.
Pohony priemyselných robotov:
- hydraulické:
- pneumatické:
- elektrické:
- DC a AC motory,
- krokové motory,
- motory s priamym pohonom (Direct Drive, DD),
- lineárne motory.
Zdroje
Prevzaté a upravené z:
• https://ssjh.sk/dokuwiki/doku.php/mnk/definicia_struktura_a_funkcie_priemyselneho_robota.





![]()
· Simulácie z fyziky· O Slovensku po slovensky· Slovenské kroje· Kurz národopisu· Diela maliarov· Kontrolné otázky, Domáce úlohy, E-testy - Priemysel· Odborné obrázkové slovníky· Poradňa žiadaného učiteľa· Rýchlokurz Angličtiny. Rozprávky (v mp3)· PREHĽADY (PRIBUDLO, ČO JE NOVÉ?)Seriály:· História sveta (1÷6)· História Slovenska (1÷5)· História módy (1÷5).
Členstvo na portáli
Poznámka pre autora
Copyright © 2013-2026 Wesline, s.r.o. Všetky práva vyhradené. Mapa stránky ako tabuľka | Kurzy | Prehľady |

